For Windows user, a good kermit terminal is not easy to find, we suggest to use TeraTerm.
TeraTerm download link: https://github.com/TeraTermProject/osdn-download/releases
Reference to vocore.io/v2.html or vocore.io/v2u.html, we use TTL to upgrade firmware if the uboot is still alive.
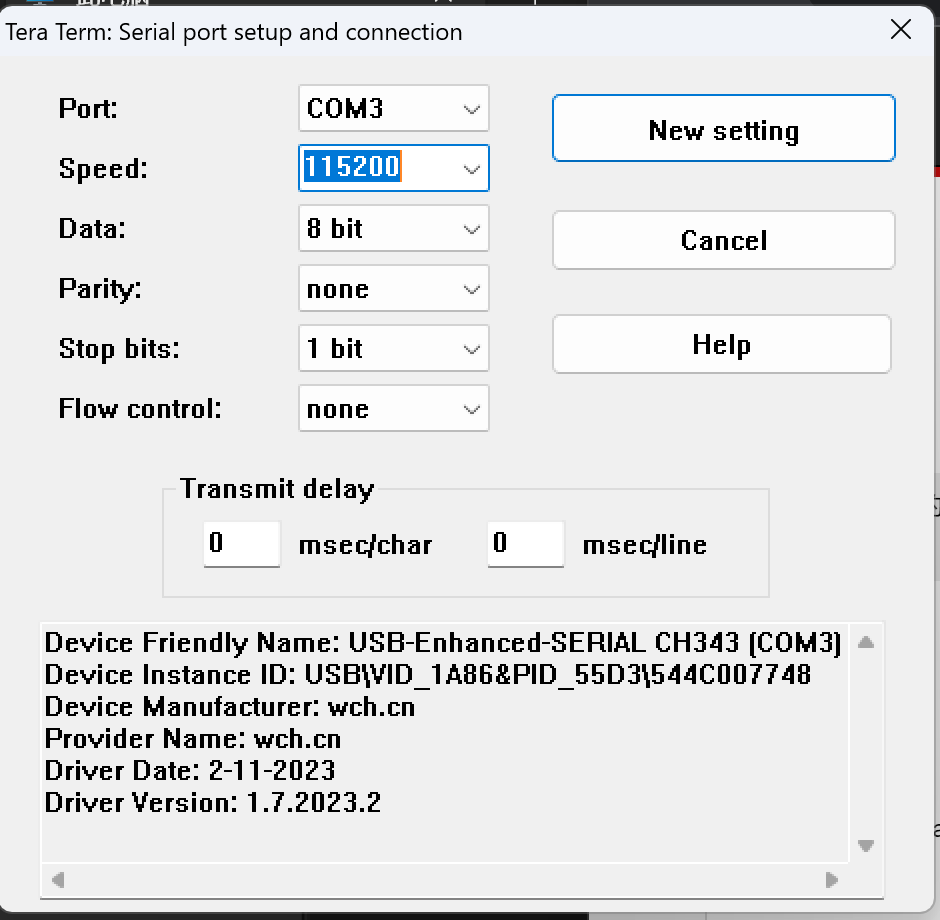
Hardware part, need to connect USB2TTL device RX and TX to VoCore2 TXD2 and RXD2, then we you power on VoCore2, you will able to read something from serial port. Serial port parameter for VoCore2 UART2 is 115200, 8n1.
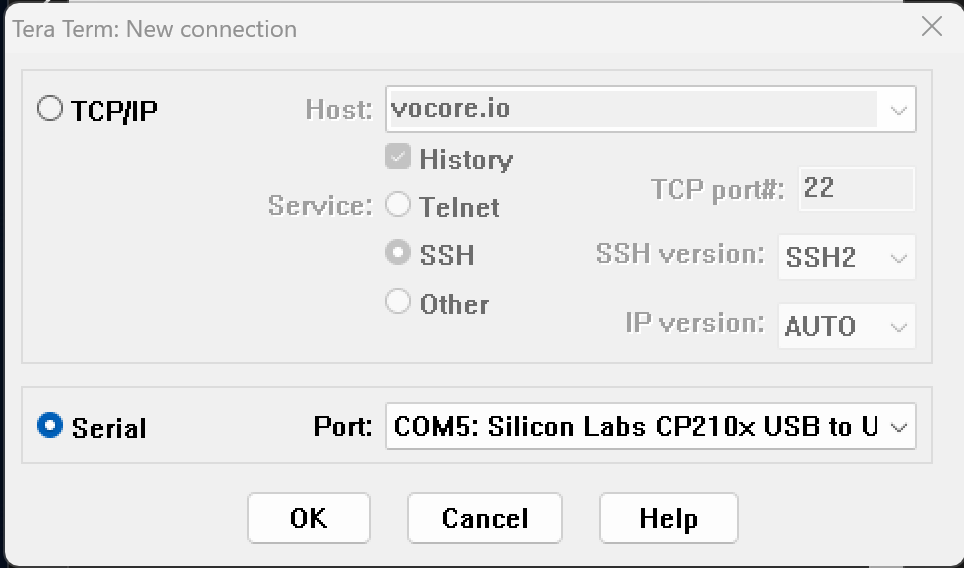
First, open TeraTerm, select COM5(or COM3, it is kind of random depends on your Windows system)
Second, setup serial port at Setup => Serial Setup
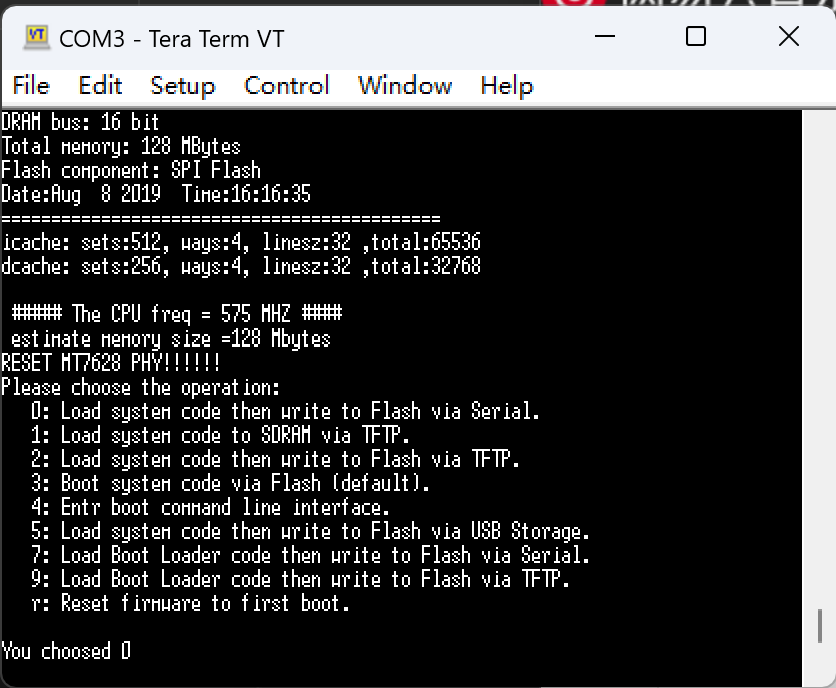
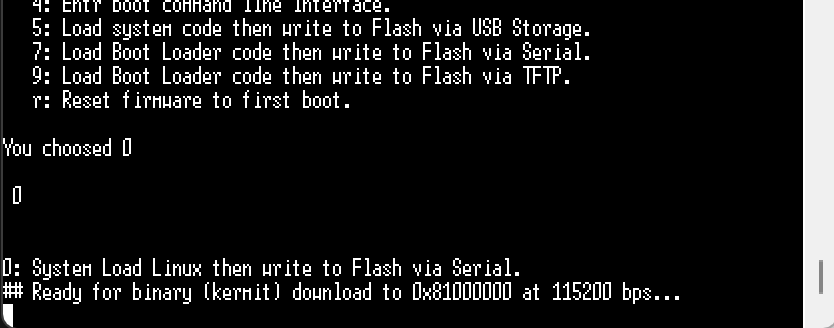
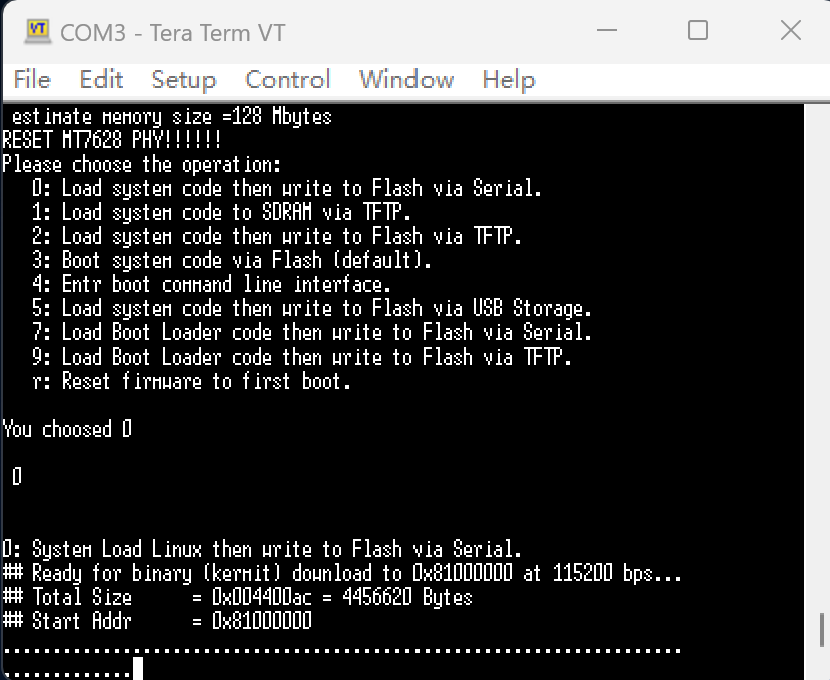
Third, at bootup, select 0 for serial port upgrade firmware.
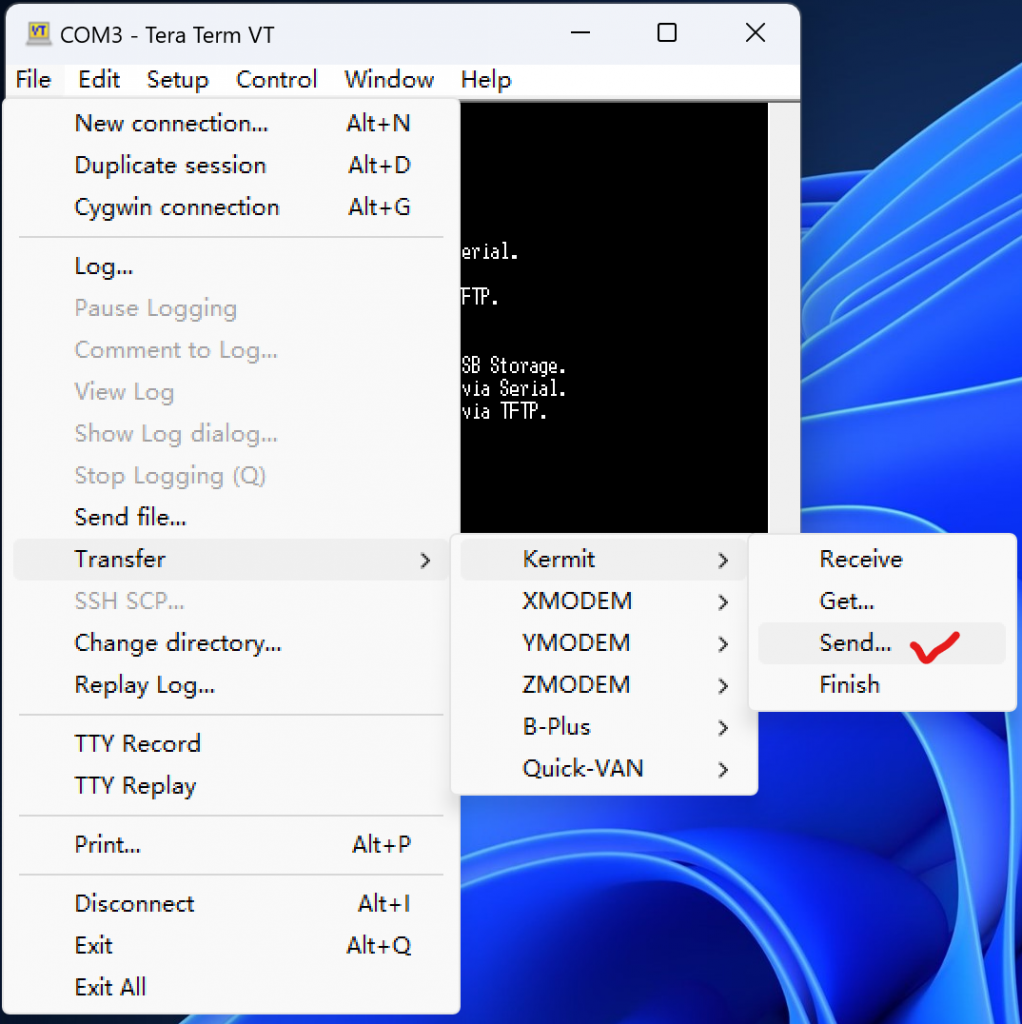
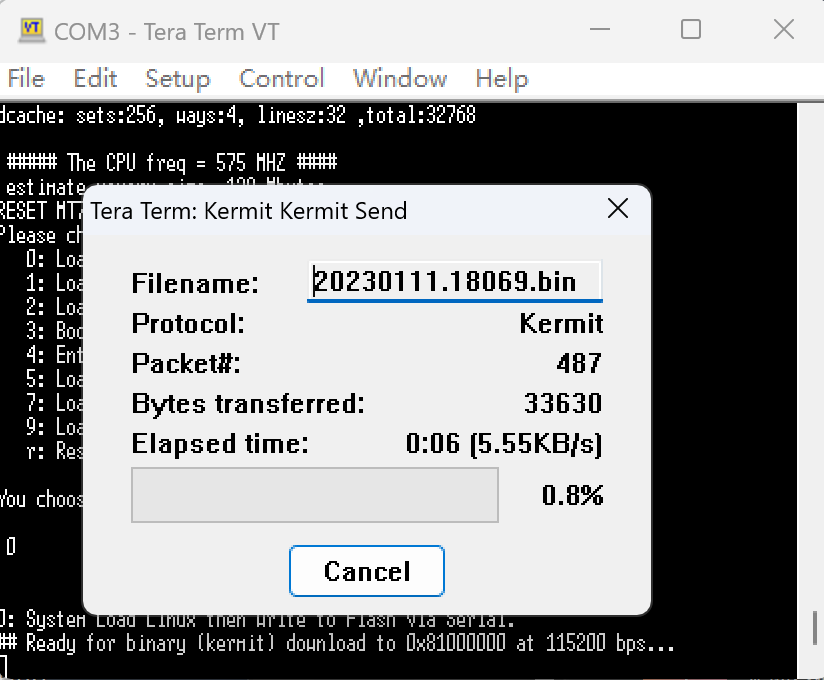
Then, choose the firmware(it is sysupgrade firmware from openwrt)
If everything works normal, check the boot up Linux Log, you will see it has upgrade to the new firmware. 🙂