Setting STA mode by LuCI is always my target.
Spend some time learn about LuCI.
First fix is about the encryption:
Currently the encrypt do not have WPA/WPA2, it is because in /usr/lib/lua/luci/model/cbi/admin_network/wifi.lua:663, we should add hwtype=ralink to enable the encrypt ways.
Note: it only have hwtype == mac80211 or hwtype == broadcom, but no ralink, so we can not find WPA/WPA2 encryption and can not setup its password. I have submitted this patch to github/openwrt/luci, hope this can be fixed.
Second fix is about the scan:
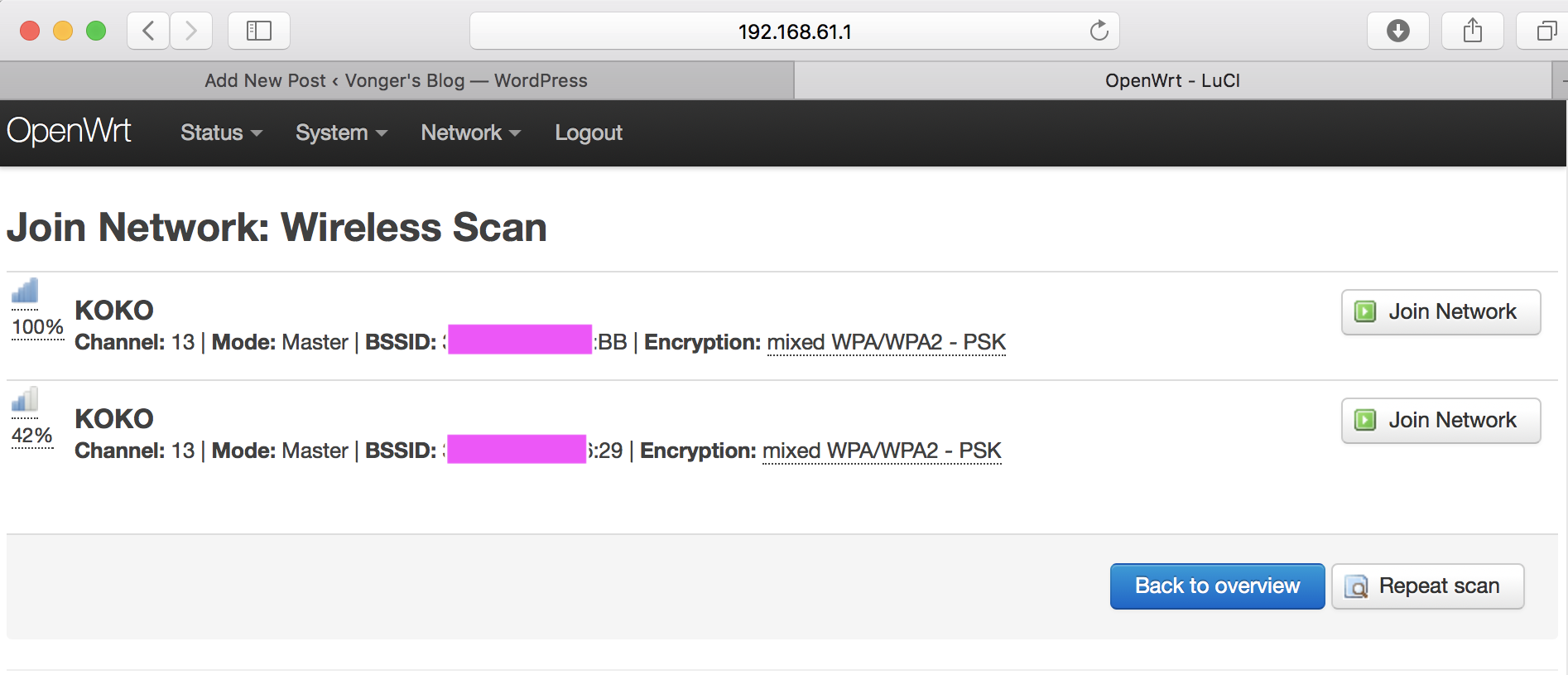
This needs to rewrite iwinfo_wext_scan.c in libiwinfo.
Anyway, we can not use that “Join Network” button, because LuCI action/design is very weird, it will remove exists AP setting…and no way set it to “apcli0”.
There is an easy way to connect to STA, directly setting up client and it will be done.
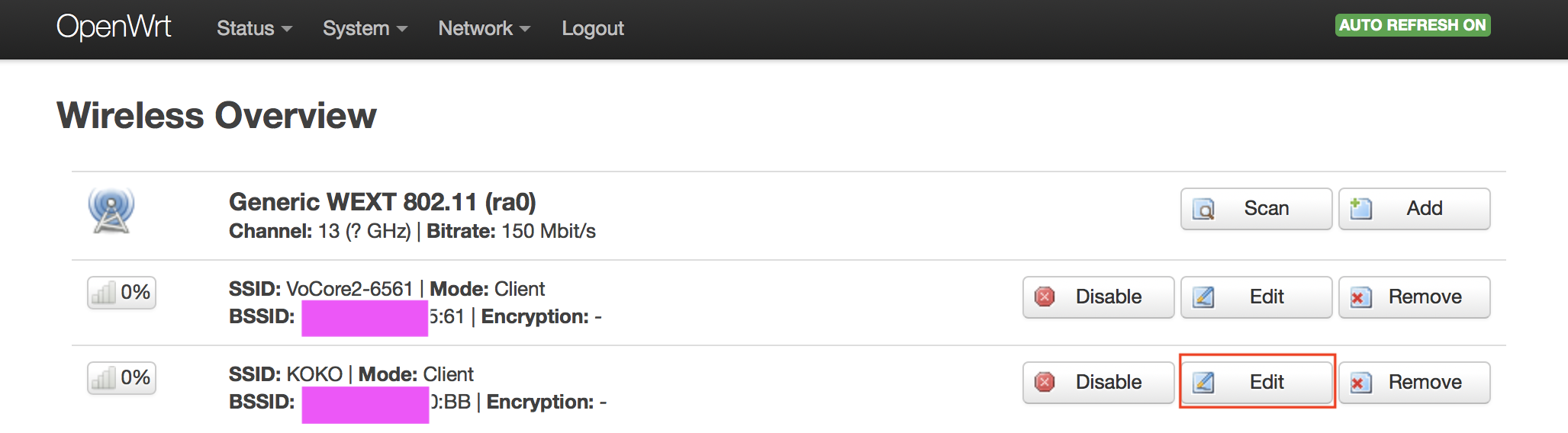
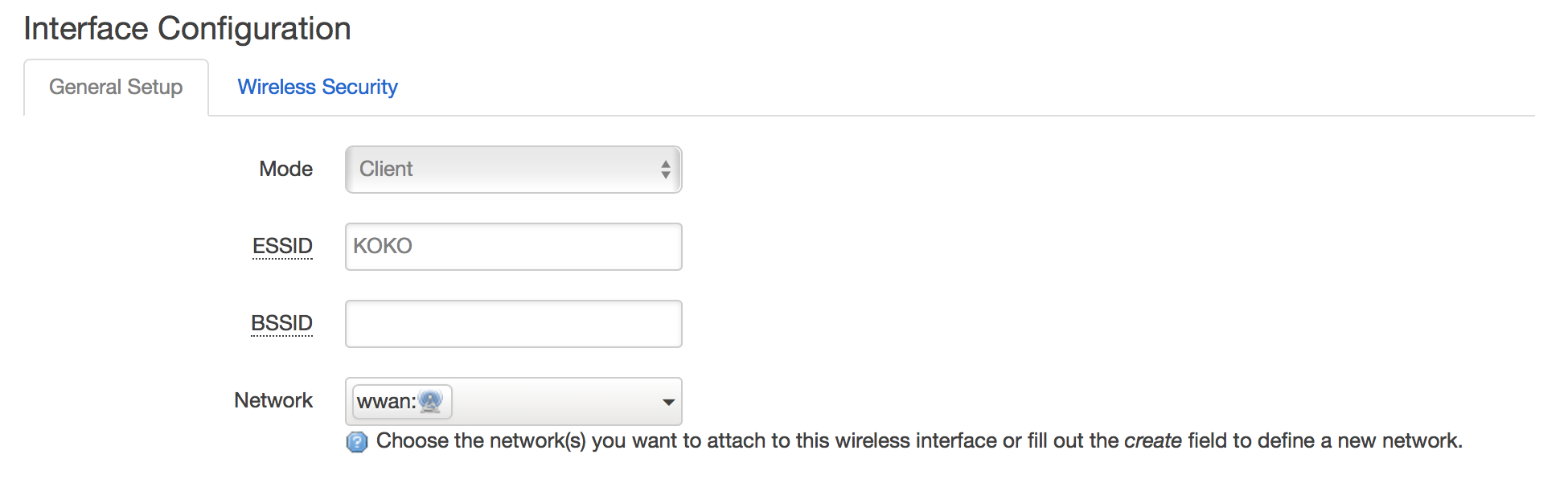
My home router name is KOKO, so ESSID is KOKO, BSSID empty. Network already in setting, then select “Wireless Security” input your password.