Due to the recent sharp surge in prices of chips, PCBs, resistors and capacitors, we have no choice but to adjust all our current production prices; otherwise, we will be forced to suspend production and supply.
Note: This price hike is factual. Chip prices have quadrupled their original cost, resistor and capacitor prices have tripled, while PCB prices have only risen to 1.5 times the standard rate.We sincerely apologize for this adjustment. We have always strived to maintain a stable pricing system.
We guarantee that once this extreme price volatility subsides, we will revert all prices back to normal levels. Unfortunately, no one can predict when this cost surge will come to an end.
We’d like to share an important update regarding the pricing of VoCore products. Recently, the global market has seen a significant and sustained increase in DDR memory prices—particularly for DDR2 components, which are essential to the VoCore design. The unit cost for the 128MB DDR2 module we use has now risen to approximately $5, and industry forecasts indicate that prices may continue to climb in the near term.This surge is driven by two major factors:
Surging demand from the AI sector, which is consuming a large share of semiconductor manufacturing capacity; and
An unexpected fire at a key memory production facility, which has temporarily reduced overall supply and further tightened the market.(PS: It is interesting, Once a factory’s chips stop selling well, a fire suddenly breaks out.)
Despite our best efforts to absorb these cost increases internally, the scale and speed of the price escalation have made it necessary for us to adjust our product pricing accordingly. This decision was not made lightly—we understand how important stable pricing is for your planning and operations, and we truly appreciate your continued trust in VoCore.We remain fully committed to delivering the same high-quality product and service you’ve come to expect from us. At the same time, we’re actively exploring alternative component strategies and longer-term solutions to mitigate future volatility.
This year, PayPal’s behavior has been highly irregular—frequently placing holds on accounts without clear justification. While accounts are typically reviewed and reinstated within two to three days, these unexpected holds cause significant disruption. As a result, we are actively seeking alternative solutions for processing small payments. One promising option is Antom, which accepts Visa and Mastercard, is not U.S.-based, and faces fewer restrictions for clients in some countries. For now, it serves as our best backup plan. We are currently prioritizing the development of this new payment functionality and hope to launch it by the end of this month. It is always good to have a plan B 🙂
Another growing challenge stems from the ongoing trade tensions: our local customs procedures have become increasingly slow, particularly during monetary inspections and package screenings. To mitigate these delays, establishing a Hong Kong branch to manage logistics and documentation has become essential.
For both samples and bulk orders, we now recommend using our newly established Hong Kong branch company account. As a free port, Hong Kong greatly simplifies export processes and streamlines international trade operations.
PS: AI helps me fix grammar, the feeling is weired somehow. 🙂
This is a test version; both features may still contain bugs.
Download at https://vocore.io/misc/v2scrctl.zip
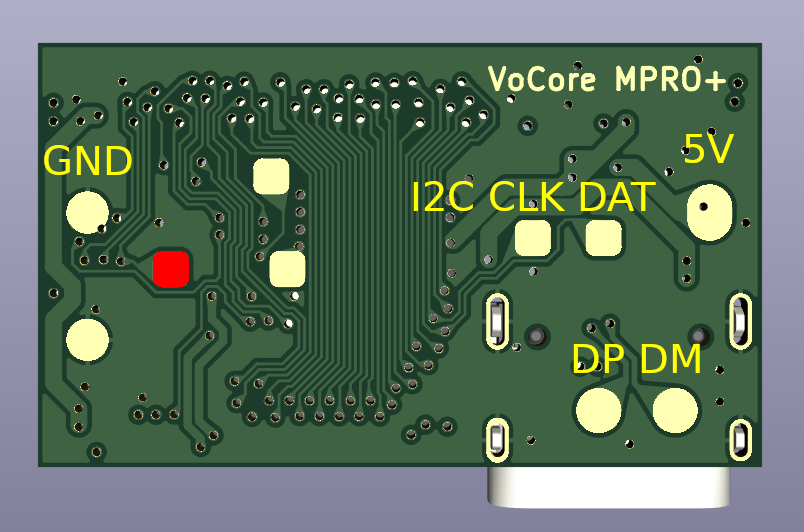
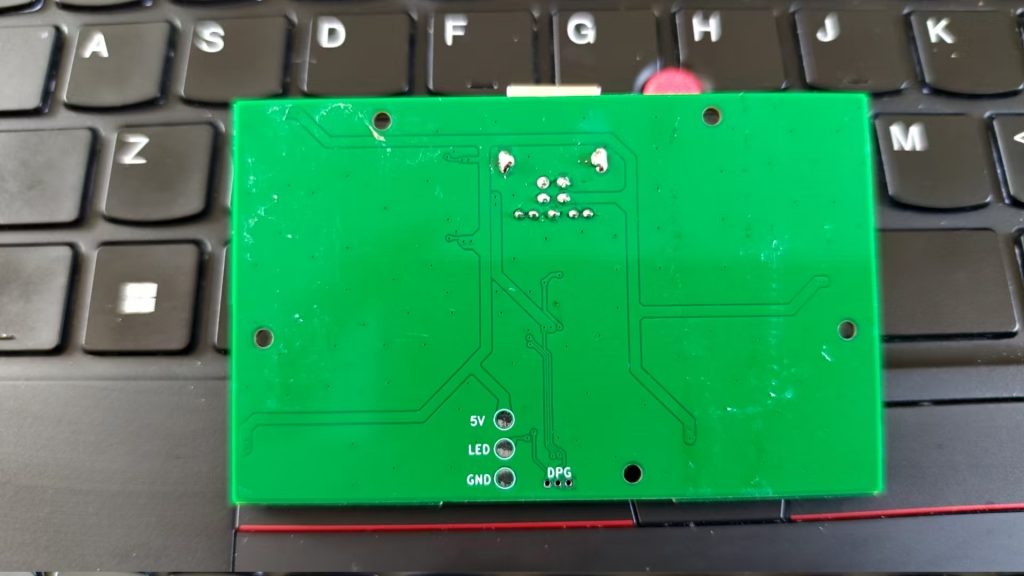
red pin directly connect to WS2812B data input
The red pin uses SPI to simulate the WS2812B signal, so we does not need additional CH32V003 to generate the waveform. However, this method can be unstable at times, as the SPI bus is also shared with the screen and internal flash. Therefore, this approach is not recommended for high-volume production—but for DIY enthusiasts, it’s a cheap and easy way to drive LEDs.
To use it:
Connect the red pin to the WS2812B data input (DIN),
Connect 5V to the WS2812B power input,
Connect GND to the WS2812B ground.
⚠️ Important: Ensure no CH32V003 is connected to I2CCLK and I2CDAT. If a CH32V003 is present, our firmware will default to sending LED signals over I²C (for backward compatibility), no signal to SPI.
You can test your WS2812B LEDs using the LED button in v2scrctl.exe.
If you prefer not to solder, we also offer a DEMO board to test this new feature—please contact our sales team for details.
📌 Note: In our store, the 6.8 DEMO dashboard still uses the older method (CH32V003 directly driving the WS2812B LEDs), which is more stable and recommended for reliable operation. If you want to try this new way to driver WS2812B, please contact our sales.
Users can now customize the VoCore screen startup logo using mprologo.exe (included in the v2scrctl.zippackage, folder v2scrctl). By default, the firmware logo includes a watermark: “Powered by VoCore”. If you require a version without the watermark, we can provide a custom firmware build—please contact our sales team for assistance.
New firmware version v0.24 now support WCID(Windows Compatible ID), so the screen is no longer require to install WinUSB driver by zadig anymore. For Win10 or Win11, upgrade to the latest firmware, new PC can directly work with the screen, detail list:
support WCID.
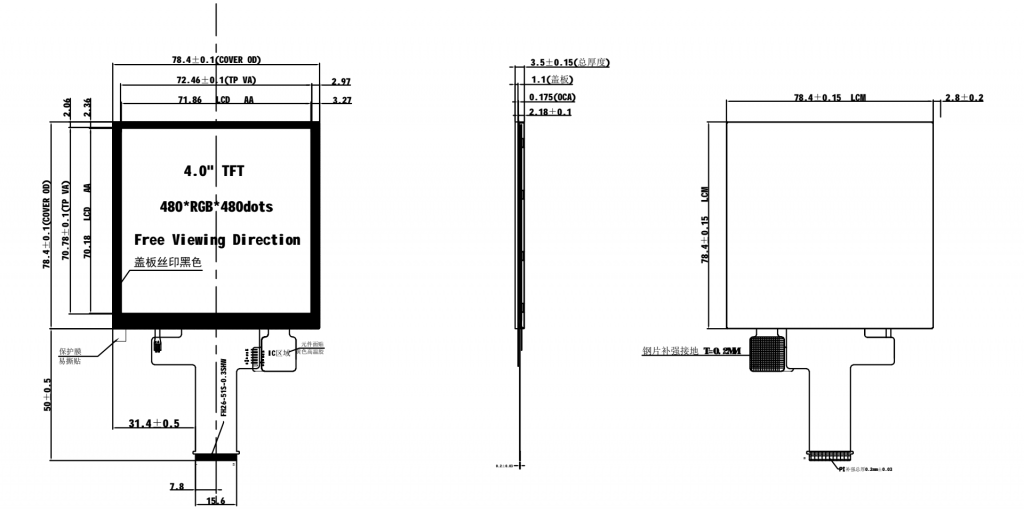
support 4inch square screen.
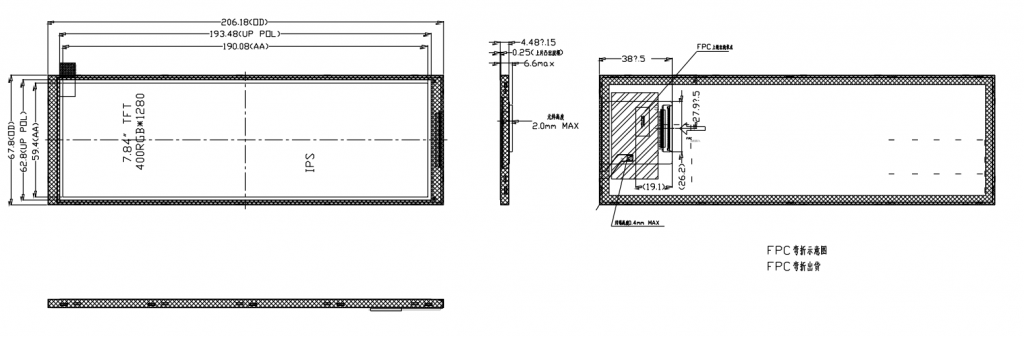
support 7.85inch long screen.
update default logo position.
optimize extend feature.
add LVGL demo firmware.
Also MPro Linux DRM driver support kernel version 6.12, please download at https://github.com/vonger/mpro_drm
Lastest firmware please download at https://vocore.io/misc/v2scrctl.zip
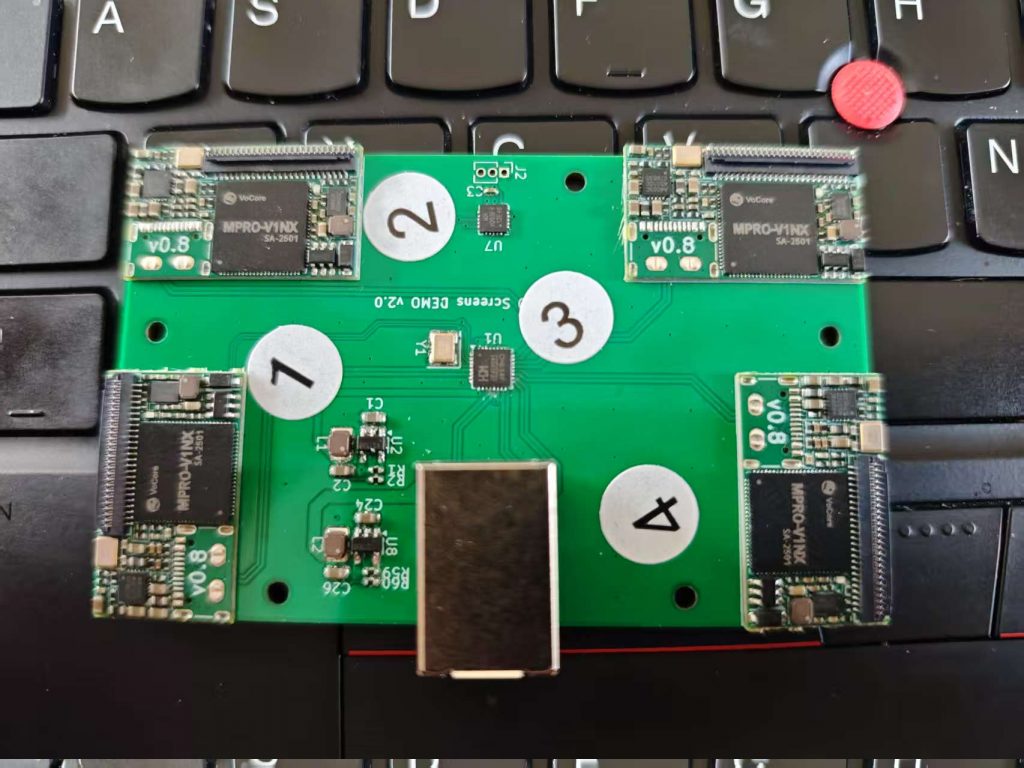
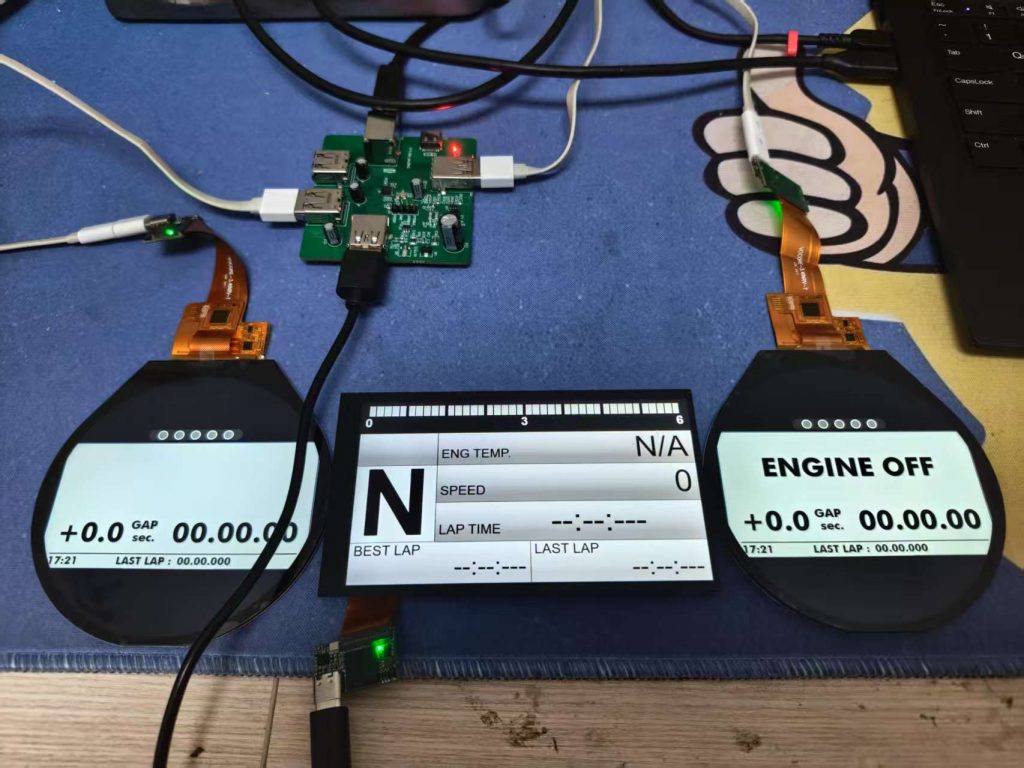
A stable multiscreen solution is very important for many situations.
MPro driver boards are all using USB2.0 for best compatible, but for more than one screen, USB2.0 HUB is not enough for data transfer and power supply.
This solution is using USB3.0 HUB, its max speed is 5000Mbps, so it should be easy to connect to more than 8pcs screens.
USB3.0 HUB max output current is at least 10W, for our usage, screen only use approx 2W for each, so 4 screen at most 8W.
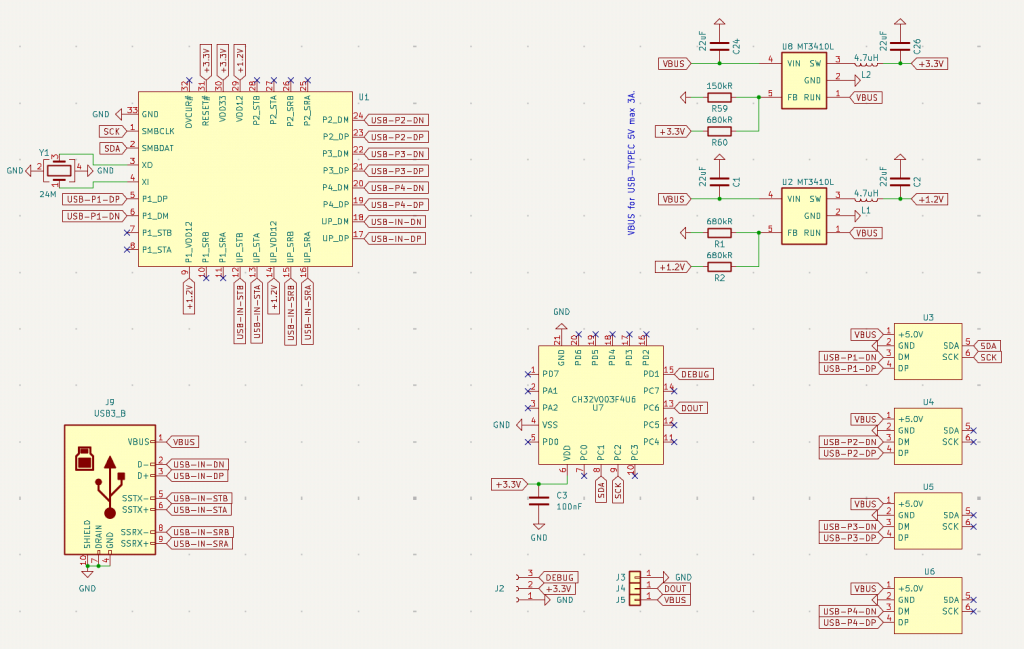
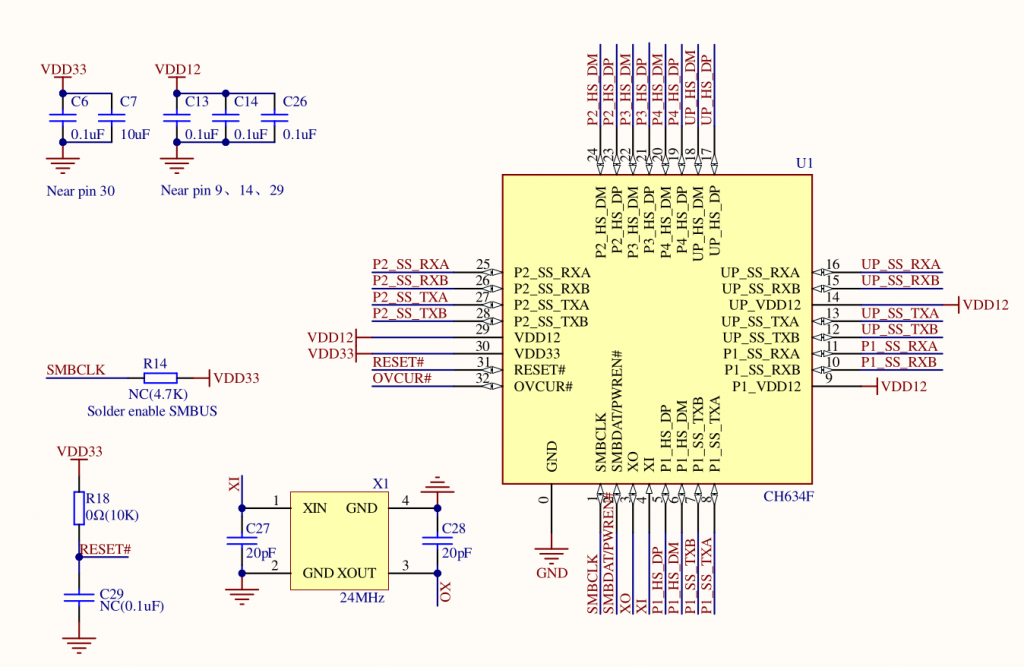
USBHub chip we can choose CH634F which cost is very low and we have tested it stable enough.
CH634F solution
In June, we will make an open source demo board with at least three screens and also some WS2812B LEDs, hopefully this demo will help a lot for the production develop.
For fast test extend/LVGL, please try https://vocore.io/misc/v2scrctl.zip, in firmware folder/MPRO/LVGL, use v2scrctl upgrade your screen to the firmware and it can work directly.
The VoCore2 Ultimate has a sound card capable of recording and playing audio, so creating a small device for use with recent open-source AI tools could be a fun project.
Sound Play The VoCore2 Ultimate uses the ES8388 sound card, which allows it to directly connect to an external 3.5mm standard speaker.
Sound Record The ES8388 also supports audio recording functionality. On the VoCore2 Ultimate, I have already routed a microphone interface to a 3.5mm jack. For higher-quality recordings, you can instead use a USB microphone to achieve better results.
AI Server This component cannot run directly on the VoCore due to high memory requirements—even for smaller models—but we can leverage open-source AI APIs like DeepSeek. I will test using the Qwen32B
model, which works well on my laptop.
The idea works like this: First, record audio input and send it to a server to convert the sound into text. The text is then forwarded to an AI server for processing, where we wait for its response. Once the reply is received, the text is converted back into an audio file (e.g., WAV format), which is transmitted via Wi-Fi or Ethernet to the VoCore2 device. Finally, the audio is played through a connected speaker.
There’s no difficult part—just a few lines of code should be able to accomplish it. 😊 Maybe I can directly use FFmpeg on the VoCore2, so I won’t need to do most of the coding myself. Additionally, the AI itself will help with coding. Hopefully, I’ll finish this project by the end of this week!